Research
-

Exoskeleton User Intent Detection
In the exoskeleton intent recognition thrust of the ROAM lab we have partnered with EksoBionics to study the interactions between human gait intent and lower-limb exoskeleton control laws so that assistive devices can perform in concert with the human body. When the robot better understands the human’s intentions, it will better serve the human in the task of restoring walking abilities when they have been lost.
-
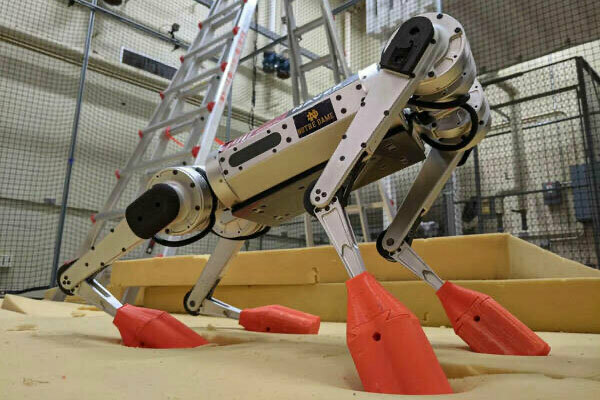
Model-Predictive Control for Legged Robots
In this project, we aim to discover fundamental strategies that would endow the robot with added agility, flexibility, and robustness to navigate challenging terrains and environments. The control strategy pursued is Model Hierarch Predictive Control (MHPC), which is an extension of traditional Model Predictive Control (MPC) approaches. MHPC is inspired by the neuro-control system of humans and animals, i.e., how humans and animals reason about motion planning in face of challenging environments. The methodology will be examined in simulation both on a biped and a quadruped robot and will be benchmarked experimentally on a Notre Dame Cheetah 3 robot in the ROAM lab.
-
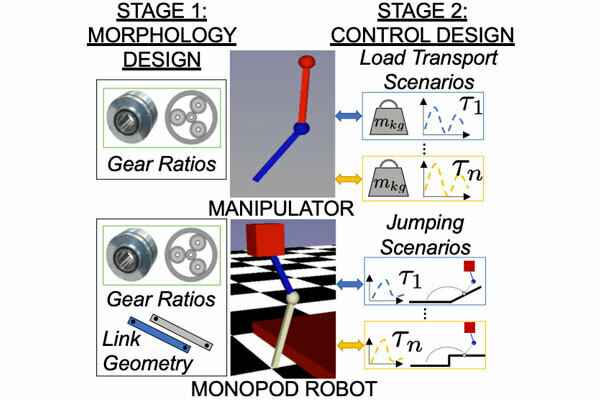
Co-Design of Robotic Mechanisms
A co-design framework manages and solves two or more design problems simultaneously rather than consecutively. Design simultaneity is particularly important when dealing with complex systems, such as those included in robotics mechanisms. Concurrency in a design dictates the fulfillment of constraints and functionality requirements shared among two or more design problems. The two main design problems in robotics involve control design and morphology design. The synergy between morphology (body) and control (brain) would enable a robot to reach mobility and skill levels comparable to those seen in animals.
-

Multi-body Dynamics and Identification
Advances in electric actuators technology have elevated robot’s physical capabilities closer to the performance level expected in real-world operations. While these powerful actuators have been highly adopted in quadrupeds, they have yet found the same level of adoption in human form factors. The gap can be attributed to the necessity to install these large-radius electric actuators in a parallel arrangement in order to facilitate load sharing between motors. However, the parallel actuation topology introduces additional complexities in the form of closed kinematics chain which provides a significant hurdle in dynamic simulation and identification.
-
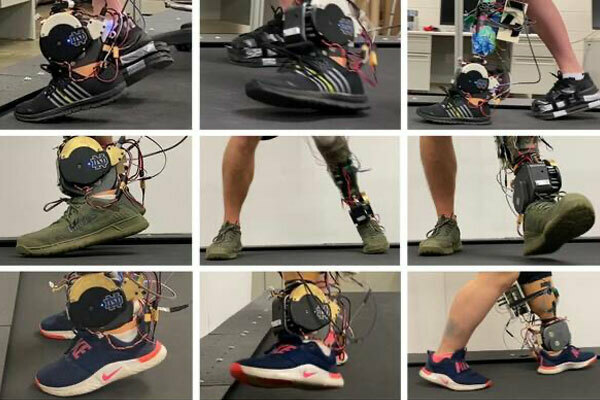
Hybrid Volitional Control for Robotic Ankle Prostheses
This research explores a new class of control strategies, known as Hybrid Volitional Control (HVC).